Section: New Results
Learning to Match Appearances by Correlations in a Covariance Metric Space
Participants : Sławomir Bąk, Guillaume Charpiat, Etienne Corvée, Francois Brémond, Monique Thonnat.
keywords: covariance matrix, re-identification, appearance matching
This work addresses the problem of appearance matching across disjoint camera views. Significant appearance changes, caused by variations in view angle, illumination and object pose, make the problem challenging.
We propose to formulate the appearance matching problem as the task of learning a model that selects the most descriptive features for a specific class of objects. Our main idea is that different regions of the object appearance ought to be matched using various strategies to obtain a distinctive representation. Extracting region-dependent features allows us to characterize the appearance of a given object class (e.g. class of humans) in a more efficient and informative way. Different kinds of features characterizing various regions of an object is fundamental to our appearance matching method.
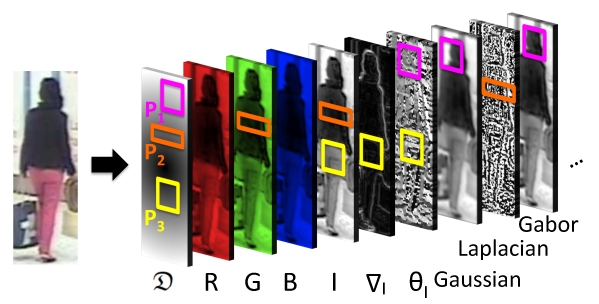
We propose to model the object appearance using covariance descriptor yielding rotation and illumination invariance. Covariance descriptor has already been successfully used in the literature for appearance matching. In contrast to state of the art approaches, we do not define a priori feature vector for extracting covariance, but we learn which features are the most descriptive and distinctive depending on their localization in the object appearance (see figure 20 ). Learning is performed in a covariance metric space using an entropy-driven criterion. Characterizing a specific class of objects, we select only essential features for this class, removing irrelevant redundancy from covariance feature vectors and ensuring low computational cost.
The proposed technique has been successfully applied to the person re-identification problem, in which a human appearance has to be matched across non-overlapping cameras [34] . We demonstrated that: (1) by using different kinds of covariance features w.r.t. the region of an object, we obtain clear improvement in appearance matching performance; (2) our method outperforms state of the art methods in the context of pedestrian recognition on publicly available datasets (i-LIDS-119, i-LIDS-MA and i-LIDS-AA); (3) using covariance matrices we significantly speed-up the processing time offering an efficient and distinctive representation of the object appearance.